Oxford Forest Place Recognition Dataset
 Visualization of four different forests test sites: Evo (Finland) and Stein am Rhein (Switzerland) are coniferous forests, and Wytham Woods and Forest of Dean (UK) are deciduous. Data collection primarily utilized backpack-mounted LiDAR systems.
Visualization of four different forests test sites: Evo (Finland) and Stein am Rhein (Switzerland) are coniferous forests, and Wytham Woods and Forest of Dean (UK) are deciduous. Data collection primarily utilized backpack-mounted LiDAR systems.
1. Overview
We are pleased to release the dataset for our paper:
“Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests”
Presented at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
This comprehensive dataset features LiDAR scans from four distinct forest environments, each captured using a backpack-mounted LiDAR system. It is designed for evaluation of LiDAR-based place recognition and SLAM techniques in challenging, dense forest environments.
To download the dataset, please go to the Download section.
2. Dataset Sequence
| Dataset | Mapping area (m2) | Duration (min) | LiDAR used | Tree types | Tree density |
|---|---|---|---|---|---|
| Evo | 125 x 50 | 24 min | Hesai XT-32 | coniforus | Medium |
| Stein am Rhein | 45 x 70 | 22 min | Hesai XT-32 | coniforus | Medium |
| Wytham Woods | 100 x 100 | 22 min | Hesai QT-64 | deciduous | High |
| Forest of Deans | 40 x 80 | 17 min | Hesai QT-64 | deciduous | Low |
Evo
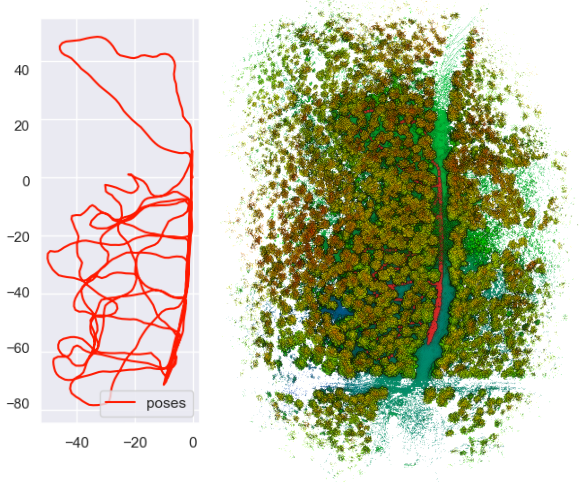
The Evo forest is characterized by tall trees, a mix of broad-leaf and coniferous species, with medium tree density, captured using a Hesai XT-32 LiDAR. We showed that there were many frequent loop closures captured inside the forest.
Stein am Rhein
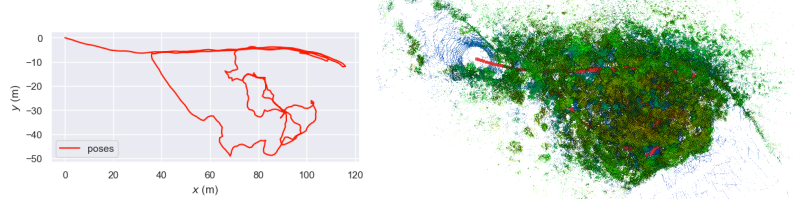
Stein am Rhein is characterized by thinned coniferous trees, open canopy, and flat ground, with medium tree density, captured using a Hesai XT-32 LiDAR.
Wytham
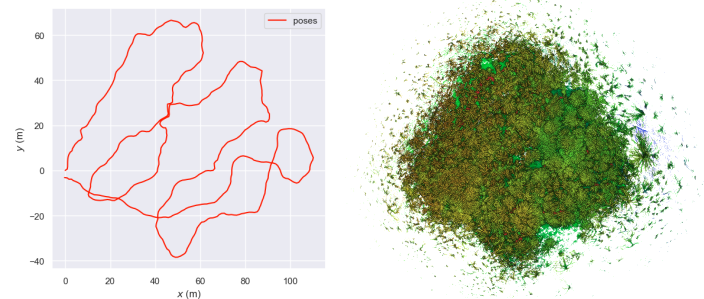
Wytham woods is a very dense forest with cluttered trees with mixed species and ground vegetation, as well as uneven terrain (valleys and hills) and captured by a Hesai QT-64 LiDAR. This dataset is the most challenging due to very high tree density. Handcrafted models experienced significant drop in precision during evaluation.
Forest of Dean
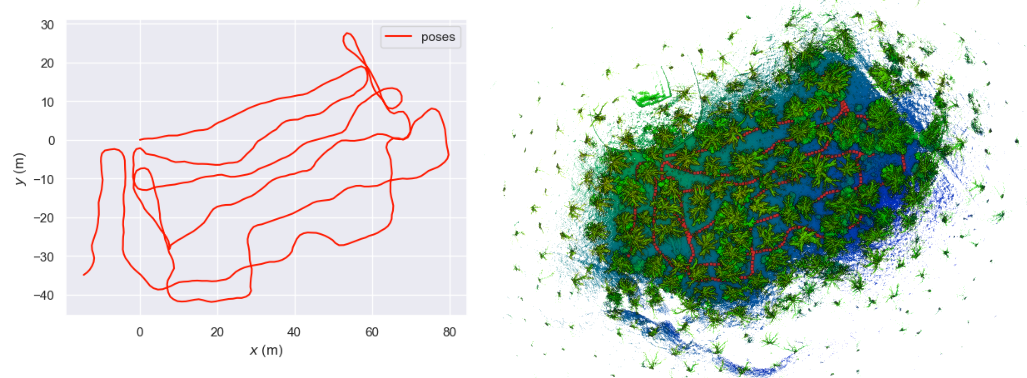
Forest of Dean is less dense broad-leaf, oak trees and flat grounds and captured by a Hesai QT-64 LiDAR. The dataset is straightforward due to low tree density and less ground vegetation.
Further Information on dataset collection
-
Ground-truth poses: We use our own SLAM system as stated in our Paper enabling loop closure detection to reduce the drift as much as possible inside the forest. Here, we provide them as ground truth poses which are used for evaluating place recognition.
-
Survey pattern: you will notice that we survey the forest in S-shape zigzag pattern. This is to ensure we get 360 view of trees.
3. Dataset Folder Structure
The dataset is organized into four folders, each representing a different forest environment:
WythamStein am RheinForest of DeanEvo
Inside each main folder, there are two subfolders:
slam_clouds: are processed outputs from our SLAM. It Contains:- A folder named
individual cloudscontaining multiple point clouds pcd files. e.g cloud_{sec}_{nsec} - A file named
slam_poses.csvis used for ground-truth poses for evaluation. It is the same format as ( Wild-Places dataset ) except ‘individual_cloud’ column. ( format: ‘individual_cloud’, ‘timestamp’, ‘x’, ‘y’, ‘z’, ‘qx’, ‘qy’, ‘qz’, ‘qw’ )
- A folder named
rosbag: Contains multiple .bag files, which contain raw LiDAR point clouds, IMU measurements, and camera images. The calibration files are provided below. Note that we used two LiDAR models: a Hesai XT32 and Hesai QT64 and separate calibration is required for each LiDAR.
| Measurement | Topic |
|---|---|
| LiDAR | /hesai/pandar |
| IMU | /alphasense_driver_ros/imu |
| Camera images | /alphasense_driver_ros/cam_{number}/compressed |
5. Download
Get the dataset download link here. Please carefully read the instruction above.
6. Paper

7. Video
Citation
@misc{oh2024evaluationdeploymentlidarbasedplace,
title={Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests},
author={Haedam Oh and Nived Chebrolu and Matias Mattamala and Leonard Freißmuth and Maurice Fallon},
year={2024},
eprint={2403.14326},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2403.14326},
}
Contact Us
If you have any enquiry about the dataset please email us haedam@robots.ox.ac.uk
Acknowledgements
We thank the assistance of the Swiss Federal Institute for Forest, Snow and Landscape Research (WSL), Forestry Research UK, and PreFor for access to forest sites. This research was funded by Horizon Europe through the Digiforest project [101070405].